یک ربات جدید Caltech می تواند از یادگیری ماشینی برای حرکت در زمین های متلاطم و ناشناخته در اقیانوس استفاده کند.
اقیانوس بزرگ است و تلاشهای ما برای درک آن هنوز تا حد زیادی در عمق است. به گفته سازمان ملی اقیانوسی و جوی، حدود 80 درصد از آبی بزرگ "نقشه برداری نشده، مشاهده نشده و ناشناخته است."
یک ربات نقشه بردار اقیانوسی با هوش مصنوعی از Caltech می تواند مسیریابی را بدون کنترل از راه دور یا مهندسان بیاموزد.
کشتیها راه اصلی برای جمعآوری اطلاعات در مورد دریاها هستند، اما ارسال مکرر آنها هزینه بر است. اخیراً، شناورهای رباتیکی به نام شناورهای آرگو همراه با جریانها حرکت میکنند و به بالا و پایین شیرجه میروند تا اندازهگیریهای مختلفی را در اعماق تا 6500 فوت انجام دهند. اما رباتهای آبزی جدید از آزمایشگاهی در کالتک میتوانند عمیقتر بپیوندند و مأموریتهای زیرآبی متناسبتری را انجام دهند.
جان او دبیری، یکی از محققان، میگوید: «ما در حال تصور رویکردی برای اکتشاف اقیانوسهای جهانی هستیم که در آن دستههایی از رباتهای کوچکتر از انواع مختلف را میگیریم و اقیانوس را با آنها برای ردیابی، تغییرات آب و هوا، برای درک فیزیک اقیانوس پر میکنیم». استاد مهندسی هوانوردی و مکانیک در موسسه فناوری کالیفرنیا.
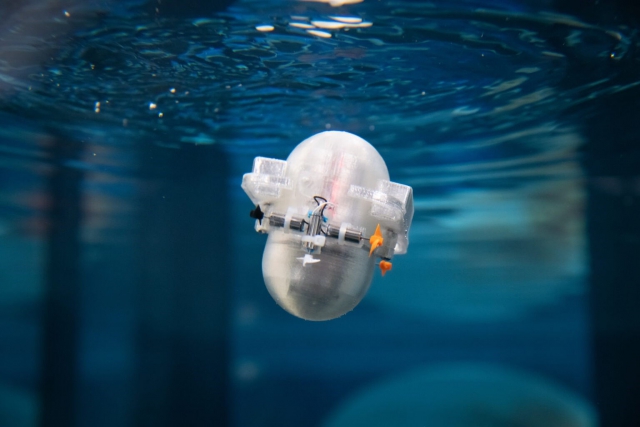
CARL-Botربات یادگیری تقویت کننده خودمختار Caltech، یک ربات آبزی به اندازه کف دست است که شبیه تلاقی بین کپسول قرص و اختاپوس دمبو است. دارای موتورهایی برای شنا کردن در اطراف، وزن آن برای ایستادن در حالت قائم و دارای سنسورهایی است که می تواند فشار، عمق، شتاب و جهت را تشخیص دهد. هر کاری که CARL انجام می دهد توسط یک میکروکنترلر در داخل تغذیه می شود که یک پردازنده 1 مگابایتی کوچکتر از تمبر پستی دارد.
CARL جدیدترین نوآوری اقیانوس پیمایش از آزمایشگاه دبیری است که توسط دانشجوی فارغ التحصیل Caltech، پیتر گونارسون، ایجاد و به صورت سه بعدی در خانه ایجاد و چاپ شده است. اولین آزمایشهایی که گانارسون با آن انجام داد در وان حمام او بود، زیرا آزمایشگاههای کلتک در آغاز سال 2021 به دلیل کووید تعطیل شدند.
در حال حاضر، CARL را هنوز می توان از راه دور کنترل کرد. اما برای رسیدن به عمیقترین بخشهای اقیانوس، نمیتوان دستی در دست داشت. این بدان معناست که هیچ محققی به CARL دستورالعمل نمی دهد - باید یاد بگیرد که به تنهایی در اقیانوس عظیم حرکت کند. گونارسون و دبیری به دنبال دانشمند کامپیوتر پتروس کوموتساکوس بودند که به توسعه الگوریتمهای هوش مصنوعی برای CARL کمک کرد تا به آن بیاموزد بر اساس تغییرات در محیط نزدیک و تجربیات گذشته خود را جهتگیری کند. پژوهش آنها این هفته در Nature Communications منتشر شد.
CARL میتواند تصمیم بگیرد مسیر خود را در حین پرواز تنظیم کند تا در اطراف جریانهای ناهموار مانور دهد و به مقصد برسد. یا میتواند با استفاده از «حداقل انرژی» از باتری لیتیوم یونی در مکان مشخصی قرار گیرد.
قدرت CARL در خاطرات نهفته است
مجموعه ای از الگوریتم های توسعه یافته توسط Koumoutsakos می تواند محاسبات راه یابی را در ربات کوچک انجام دهد. الگوریتمها همچنین از حافظه ربات از رویاروییهای قبلی، مانند نحوه عبور از گرداب، بهره میبرند. دبیری توضیح میدهد: «ما میتوانیم از این اطلاعات برای تصمیمگیری در مورد چگونگی هدایت آن موقعیتها در آینده استفاده کنیم.
گانارسون میافزاید: برنامهنویسی CARL به آن امکان میدهد مسیرهای مشابهی را که در ماموریتهای قبلی طی کرده بود به خاطر بسپارد، و "در طول تجربیات مکرر، بهتر و بهتر در نمونهبرداری از اقیانوس با زمان کمتر و انرژی کمتر، بهتر شود."
بسیاری از یادگیری ماشین در شبیه سازی انجام می شود، جایی که تمام نقاط داده تمیز هستند. اما انتقال آن به دنیای واقعی می تواند کثیف باشد. سنسورها گاهی اوقات غرق می شوند و ممکن است تمام معیارهای لازم را انتخاب نکنند. گانارسون میگوید: «ما تازه آزمایشها را در تانک فیزیکی شروع میکنیم. اولین قدم این است که آزمایش کنید آیا CARL می تواند وظایف ساده ای مانند غواصی مکرر را انجام دهد یا خیر. ویدئوی کوتاهی در وبلاگ Caltech نشان میدهد که این ربات به طرز ناشیانهای در حال حرکت در یک مخزن آب ساکن است.
با ادامه آزمایش، تیم قصد دارد CARL را در یک مخزن استخر مانند با جتهای کوچک قرار دهد که میتواند جریانهای افقی را برای حرکت آن ایجاد کند. هنگامی که ربات از آن فارغ التحصیل شد، به یک مرکز دو طبقه بلند میرود که میتواند جریانهای بالا و پایین را تقلید کند. در آنجا، باید بفهمد که چگونه می توان عمق معینی را در منطقه ای که آب اطراف آن در همه جهات جریان دارد حفظ کرد.
با این حال، در نهایت ما CARL را در دنیای واقعی میخواهیم. دبیری میگوید: او آشیانه را ترک میکند و به اقیانوس میرود و با آزمایشهای مکرر در آنجا، هدف این است که خودش یاد بگیرد که چگونه مسیریابی کند.»
در طول آزمایش، تیم همچنین حسگرها را در CARL و روی آن تنظیم خواهد کرد. دبیری میگوید: «یکی از سؤالاتی که ما داشتیم این است که حداقل مجموعه سنسورهایی که میتوانید برای انجام کار روی آن قرار دهید چیست؟ هنگامی که یک روبات با ابزارهایی مانند LiDAR یا دوربینها پوشانده میشود، «این امر توانایی سیستم را برای رفتن برای مدت طولانی در اقیانوس قبل از اینکه مجبور به تعویض باتری شوید، محدود میکند.»
با کاهش بار حسگر، محققان میتوانند عمر CARL را طولانیتر کنند و فضایی را برای اضافه کردن ابزارهای علمی برای اندازهگیری pH، شوری، دما و غیره باز کنند.
نرم افزار CARL می تواند الهام بخش عروس دریایی بیونیک بعدی باشد
در اوایل سال گذشته، گروه دبیری مقاله ای در مورد چگونگی استفاده از زاپ های الکتریکی برای کنترل حرکات عروس دریایی منتشر کرد. این امکان وجود دارد که افزودن تراشهای که دارای الگوریتمهای یادگیری ماشینی مشابهی است به CARL، محققان را قادر میسازد تا ژلهها را در اقیانوس بهتر هدایت کنند.
دبیری میگوید: «پیدا کردن نحوه عملکرد این الگوریتم ناوبری بر روی یک چتر دریایی زنده واقعی میتواند زمان و تلاش زیادی را صرف کند. در این راستا، CARL یک مخزن آزمایشی برای الگوریتمهایی فراهم میکند که در نهایت میتوانند به موجودات تغییر یافته مکانیکی وارد شوند. برخلاف روباتها و مریخنوردها، این ژلهها محدودیتهای عمقی ندارند، زیرا زیستشناسان میدانند که میتوانند در سنگر ماریانا، حدود 30000 فوت زیر سطح، وجود داشته باشند.»
CARL، به خودی خود، هنوز می تواند یک دارایی مفید در نظارت بر اقیانوس باشد. با توجه به اینکه می تواند به بستر دریا و سایر سازه های شکننده نزدیک شود، می تواند در کنار سازهای موجود مانند شناورهای آرگو کار کند و به مأموریت های انفرادی برای انجام کاوش های دقیق تر برود. همچنین میتواند ارگانیسمهای بیولوژیکی مانند ماهیها را ردیابی و علامتگذاری کند.
ممکن است روزی در آینده تصور کنید که 10000 یا یک میلیون CARL (حدس زده میشود نامهای متفاوتی به آنها داده شود) که همگی به اقیانوس میروند تا مناطقی را که امروز به سادگی نمیتوانیم به آنها دسترسی داشته باشیم را به طور همزمان اندازهگیری کنیم تا زمانی را دریافت کنیم. دبیری میگوید: تصویری حلشده از نحوه تغییر اقیانوس. این برای مدلسازی پیشبینیهای آب و هوا، اما همچنین برای درک نحوه عملکرد اقیانوس، واقعاً ضروری خواهد بود.
های فن تک از شما دعوت می کند نظرات خود را در مورد این مقاله به اشتراک بگذارید