محققان مؤسسه فناوری ایتالیا IIT اخیراً در حال بررسی یک ایده جذاب، یعنی ساخت روباتهای انساننما که میتوانند پرواز کنند، بودهاند.
با این حال، برای کنترل مؤثر حرکات رباتها، اشیاء یا وسایل نقلیه پرنده، محققان به سیستمهایی نیاز دارند که بتوانند بهطور قابل اعتماد شدت نیروی رانش تولید شده توسط ملخها را تخمین بزنند و به آنها اجازه حرکت در هوا را میدهند.
از آنجایی که اندازه گیری مستقیم نیروهای رانش دشوار است، معمولاً بر اساس داده های جمع آوری شده توسط حسگرهای داخل هواپیما برآورد می شوند. تیم IIT اخیراً چارچوب جدیدی را معرفی کرده است که میتواند شدت رانش سیستمهای چند بدنه پرنده را که مجهز به حسگرهای اندازهگیری رانش نیستند، تخمین بزند. این چارچوب، که در مقالهای در IEEE Robotics and Automation Letters ارائه شده است، در نهایت میتواند به آنها کمک کند تا ربات انساننمای پرنده مورد نظرشان را محقق کنند.
دانیل پوچی، رئیس آزمایشگاه هوش مصنوعی و مکانیکی که این مطالعه را انجام داد، به TechXplore گفت: «ایدههای اولیه ما برای ساخت ربات انساننمای پرنده در حدود سال 2016 مطرح شد. "هدف اصلی این بود که ربات هایی را تصور کنیم که بتوانند در سناریوهای فاجعه مانند عمل کنند، جایی که بازماندگانی برای نجات در ساختمان های نیمه تخریب شده وجود دارند و دسترسی به این ساختمان ها به دلیل سیل احتمالی و آتش سوزی در اطراف آنها دشوار است."
هدف اصلی کار اخیر پوچی و همکارانش ابداع رباتی بود که بتواند اشیا را دستکاری کند، بر روی زمین راه برود و پرواز کند. از آنجایی که بسیاری از روباتهای انساننما میتوانند هم اجسام را دستکاری کنند و هم روی زمین حرکت کنند، تیم تصمیم گرفت که قابلیتهای یک ربات انساننما را برای پرواز نیز گسترش دهد. به جای توسعه یک ساختار کاملاً جدید روباتیک.
پوچی میگوید: «روباتهای انساننما پس از برخورداری از تواناییهای پرواز، میتوانند از ساختمانی به ساختمان دیگر پرواز کنند و از آوار، آتشسوزی و سیل اجتناب کنند. پس از فرود، آنها می توانند اشیاء را دستکاری کنند تا درها را باز کنند و دریچه های گاز را ببندند، یا برای بازرسی داخل ساختمان ها راه بروند، به عنوان مثال به دنبال بازماندگان آتش سوزی یا بلایای طبیعی بگردند.
در ابتدا، Pucci و همکارانش سعی کردند iCub، یک ربات انسان نما مشهور که در IIT ساخته شده است را با توانایی تعادل بدن خود بر روی زمین، به عنوان مثال روی یک پا، ارائه دهند. هنگامی که آنها به این هدف دست یافتند، شروع به کار بر روی گسترش مهارت های حرکتی ربات کردند، به طوری که بتواند در هوا پرواز کند و حرکت کند. این تیم به حوزه تحقیقاتی که روی آن تمرکز کردهاند به عنوان «رباتیک انساننمای هوایی» اشاره میکنند.
پوچی گفت: «تا جایی که میدانیم، ما اولین کار را درباره رباتهای انساننمای پرنده تولید کردیم. این مقاله آشکارا کنترلکنندههای پرواز را فقط در محیطهای شبیهسازی آزمایش میکرد، اما با توجه به نتایج امیدوارکننده، ما سفر طراحی iRonCub، اولین ربات انساننما با موتور جت را آغاز کردیم که در آخرین مقالهمان ارائه شد.
چارچوب تخمین رانش ایجاد شده توسط محققان، طراحی ربات پرنده آنها را به طور قابل توجهی ساده می کند و هزینه ساخت آن را کاهش می دهد، زیرا نیازی به نصب حسگرهای نیرو بر روی هر یک از موتورهای جت که ربات را به حرکت در می آورد، نیست. به جای تخمین نیروی رانش با استفاده از دادههای حسگر نیرو، این چارچوب دو منبع اطلاعات مختلف را در یک فرآیند تخمین واحد ترکیب میکند.
اولین منبع اطلاعاتی که توسط فریم ورک استفاده می شود، توسط مدلی مشتق شده است که دستورات ارسال شده به موتور جت را با نیروی رانش حاصله مرتبط می کند. این یک مدل مبتنی بر داده است که بر روی داده های جمع آوری شده توسط محققان آموزش داده شده است.
پوچی گفت: ما ابتدا یک مجموعه آزمایشی موقتی ساختیم که بسیار شبیه یک محفظه نسوز و ضد گلوله است که میتوان موتورهای جت را در آن قرار داد و آزمایشها را با خیال راحت اجرا کرد. سپس، با استفاده از این تنظیمات، دادههای ورودی/خروجی را از موتور جت جمعآوری کردیم و مدلهایی را انتخاب کردیم که نحوه رفتار موتور را توصیف میکردند. برای این کار، ما بر اساس یکی از کارهای قبلی خود ساختهایم.»
دومین منبع اطلاعاتی که توسط چارچوب تیم برای تخمین نیروی رانش استفاده میشود، به اصطلاح «تحرک مرکزی» کل ربات است. این ارزش مشهوری است که توسط روباتیکهایی که سیستمهای انساننما را برای کنترل و تخمین حرکات خود توسعه میدهند، استفاده میکنند.
پوچی گفت: «مثلاً هنگامی که از این مقدار به درستی استفاده شود، میتواند حرکات غواصی را که از روی صخره میپرد، مشخص کند. به عبارت دیگر، میتوان از آن برای ارتباط علل (به عنوان مثال، نیروهای رانش) و اثرات (مانند شتابهای عمودی برای برخاستن) حرکت ربات قبل و بعد از برخاستن استفاده کرد.»
اگر قرار بود از آنها به صورت جداگانه استفاده شود، هر دو منبع اطلاعاتی که توسط چارچوب تیم استفاده می شود محدودیت های قابل توجهی خواهد داشت. به عنوان مثال، مدل مبتنی بر داده که آنها استفاده کردند، تنها در صورتی قادر به تخمین دقیق نیروی رانش خواهد بود که یک موتور جت همیشه دقیقاً به همان روش عمل میکرد. با این حال، موتورهای جت بر اساس عوامل مختلف محیطی مختلف می توانند عملکردهای متفاوتی داشته باشند.
پوچی گفت: از سوی دیگر رویکرد دوم از اطلاعات جت داخلی استفاده نمی کند. "بنابراین، ما از فیلتر کالمن برای ترکیب هر دو روش برای غلبه بر اشکالات فردی آنها استفاده کردیم. قابل توجه، رویکرد تخمین ما مستقل از ماهیت خاص ربات های انسان نما پرنده است و می تواند در کنترلرهای پرواز طراحی شده برای هر ربات پرنده چند بدنه استفاده شود."
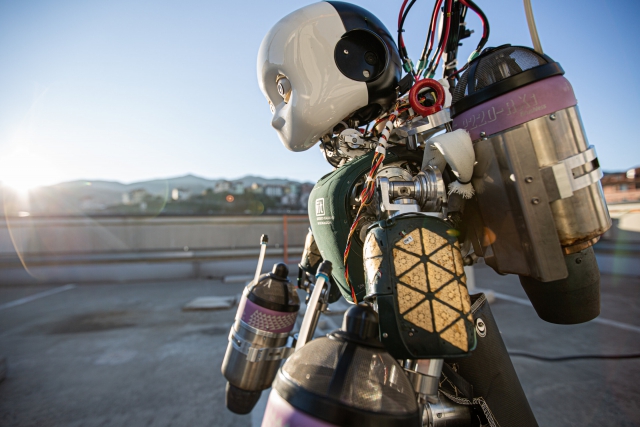
Pucci و همکارانش برای ارزیابی اثربخشی چارچوب خود، آن را بر روی یک ربات جدید توسعه یافته به نام iRonCub آزمایش کردند که تکاملی از ربات iCub با موتورهای جت یکپارچه است. در حالی که تیم مدتی است روی این ربات کار می کند، آنها اخیراً توانستند مجموعه کاملی از ویژگی های آن را نشان دهند.
پوچی توضیح داد: «کار با رباتهای جت کار سادهای نیست، زیرا دمای هوای جت ممکن است به 700 درجه سانتیگراد برسد و سرعت هوا ممکن است ویژگیهای مافوق صوت داشته باشد که در حدود 1800 کیلومتر بر ساعت جریان دارد.» "به همین دلیل، ما رویه ها و پروتکل های آزمایشی دقیقی را توسعه دادیم که به ما امکان می دهد با iRonCub به طور ایمن کار کنیم. از این نظر، تیم تحقیقاتی ما مجبور بود بر چندین مشکل و مسائلی غلبه کند که به دور از موارد مرتبط با تحقیقات روباتیک کلاسیک و نزدیک تر به مشکلات مربوط به رباتیک هستند. اویونیک».
در حالی که محققان تاکنون فقط چارچوب تخمین رانش را روی ربات انساننما iRonCub آزمایش کردهاند، اما میتوان آن را برای سایر رباتهای پرنده با ساختارهای بدنی متفاوت نیز به کار برد. این شامل رباتهای پرنده قابل تنظیم مجدد میشود، سیستمهایی که میتوانند شکل یا پیکربندی خود را برای انجام اقدامات خاص تغییر دهند.
پوچی گفت: «مشکل تخمین نیروهای رانش در هر صورت برای یک پرواز موفقیتآمیز حیاتی است. علاوه بر این، علاوه بر کاربرد آیندهنگر رباتهای انساننمای پرنده در سناریوهای فاجعهآمیز، ما معتقدیم که کار ما میتواند در طرحهای سادهتری نسبت به رباتهای انساننمای پرنده، از جمله جعبههای پرنده با نیروی جت، اعمال شود.
اگر برای جعبههای پرنده جت استفاده شود، چارچوب تخمین رانش توسعهیافته توسط محققان میتواند فرصتهای جدیدی را برای تحویل محصولات مختلف در مکانهای دوردست، از جمله مواد غذایی و داروها، باز کند. اگر از اتحادیه اروپا بودجه دریافت کنند یا مبانی علمی، پوچی و همکارانش مایلند این کاربرد احتمالی را عمیقتر بررسی کنند.
در همین حال، این تیم قصد دارد به کار بر روی iRonCub ادامه دهد و بر قابلیت های پرواز آن تمرکز کند. امید آنها این است که در نهایت اولین ربات انسان نما قابل اعتماد و با کارایی بالا را که قادر به حرکت زمینی و هوایی باشد، ارائه دهند.
پوچی گفت: «در آزمایشگاه خود، تیمهای تحقیقاتی متعددی داریم که به موضوعات مختلف مرتبط با رباتیک انساننما میپردازند. تیم iRonCub بر روی جهات تحقیقاتی بلندمدت، میانمدت و کوتاهمدت در رباتیک انساننمای هوایی تمرکز دارد. برای بلندمدت، دو محقق در تیم ما، آنتونلو پائولینو و فابیو دی ناتال، در حال بررسی مدلهای دینامیک سیالات محاسباتی هستند. برای اینکه آیرودینامیک ربات در کنترل پرواز iRonCub ادغام شود، از سوی دیگر، فابیو برگونتی بر روی ادغام این مدلها در معماریهای کنترل رباتهای انساننمای پرنده آیندهنگر تمرکز خواهد کرد که شکل خود را با توجه به آیرودینامیک اطراف تطبیق میدهند، گویی که روبات ترانسفورماتور."
به عنوان یک هدف تحقیقاتی میان مدت، دو تن از همکاران Pucci، Affaf Momin و Hosameldin Awadalla، قصد دارند چارچوب تخمین نیروی رانش را که با استفاده از هوش مصنوعی (AI) و ابزارهای محاسباتی مبتنی بر داده ایجاد کردهاند، بهبود بخشند. متعاقباً، همکار آنها Giuseppe L'Erario روی ادغام این الگوریتمها در کنترلکنندههایی تمرکز خواهد کرد که راهرفتن، دستکاری، دویدن، برخاستن و راهبردهای پرواز افقی ربات را یکی میکنند.
های فن تک از شما دعوت می کند نظرات خود را در مورد این مقاله به اشتراک بگذارید