در حوزه کنترل فرآیند، مهم ترین متغیرهایی که کنترل کردن آن ها مد نظر است،متغیرهایی از جمله دما، فشار و جریان سیال می باشد.
برای کنترل کردن این پارامترها اولین کنترلری که به ذهن می رسد، کنترلر PID می باشد. این کنترلر کلاسیک، در اکثر مواقع بازدهی خوب و عملکرد مطلوبی دارد، شاید به جرأت بتوان گفت که بیش از نیمی از کنترلرها در صنعت کنترل فرآیند، همین PID های کلاسیک می باشند.
اما وقتی با متغیرهایی روبرو هستیم که رفتار آن ها غیرخطی می باشد و یا یک لختی ذاتی (همانند متغیر دما) با خود به همراه دارند، آیا کنترلرهای PID برای کنترل کردن این متغیرها مناسب هستند؟ در نگاه سطحی پاسخ این سوال مثبت است، اما باید گفت که حتی اگر کنترلرهای PID را با روش های تنظیم ضرایب معروفی همچون روش زیگلر-نیکولز یا روش های دیگر برای متغیرهایی که به شدت رفتار غیر خطی دارند (که معمولا کنترلرهای PID برای متغیر های غیر خطی پاسخ نوسانی و کاملا ناپایدار دارند)، تنظیم کنیم، باز هم نمی توان settling time overshoot,که پارامترهایی مهمی برای رسیدن به پاسخ مطلوب هستند را تا حد انتظار کاهش داد یعنی همچنان با تاخیر در رسیدن به پاسخ مطلوب و یا overshoot روبرو هستیم. در این مواقع باید به استراتژی های نوینی چون استراتژی منطق فازی در صنعت کنترل روی آوریم. این استراتژی نوین کنترلی که به همت دانشمند برجسته ایرانی تبار، پروفسور لطف علی رحیم اغلو عسکر زاده مشهور به لطفی زاده بنا نهاده شد، توانسته جایگاه خوبی را در سال های اخیر در صنعت کنترل بدست آورد که از نمونه های بارز آن سیستم کنترل قطار زیرزمینی سندایی ژاپن در سال 1987 بود که دو مهندس ژاپنی به نام های پاشونوبو و میاموتو از شرکت هیتاچی توانستند یکی از پیشرفته ترین سیستم های قطار زیرزمینی را در جهان با استفاده از منطق فازی به وجود آورند. خوب بهتر است به موضوع مورد بحث خود یعنی جایگاه منطق فازی در صنعت نفت و گاز برگردیم. تصاویر زیر نمونه هایی از کاربرد کنترلر فازی برای تولید اتیلن گلیکول می باشد(سیستم غیر خطی درجه دو) که برای این منظور، هدف، کنترل کردن تغلیظ اتیلن گلیکول با استفاده از تغلیظ اتیلن اکسید می باشد. در این سیستم کنترلی عملکرد کنترلر فازی و کنترلر PID با هم مقایسه شده اند.
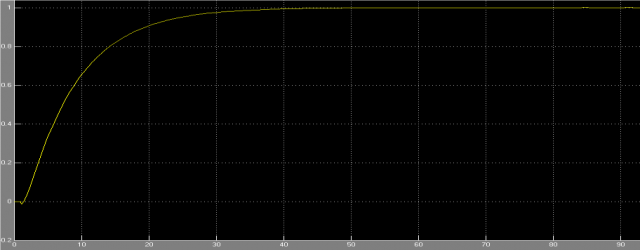
پاسخ کنترلر PID

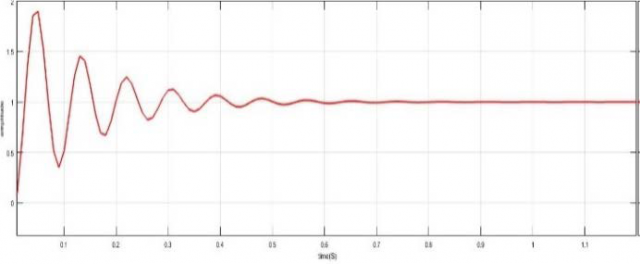
پاسخ کنترلر فازی
همانطور که در تصاویر مشاهده می کنید تفاوت عمده میان کنترلر فازی و کنترلر PID در Settling Time یا همان زمان نشست می باشد که در کنترلر PID حدود 40 ثانیه و در کنترلر فازی حدود 4 ثانیه می باشد (کنترلر PID با استفاده از روش زیگلر – نیکلز تیون شده است) که این امر نشان دهنده قدرتمندی کنترلرهای فازی در کنترل کردن سیستم های غیر خطی می باشد.
یکی دیگر از کاربردهای کنترلرهای فازی به کار بردن آن ها برای تیون کردن کنترلرهای PID به جای روش های کلاسیک مانند زیگلر – نیکولز می باشد که یک نمونه از این کاربرد برای یک ربات بازو(سیستم غیر خطی درجه سه) که ضرایب کنترلرPID آن توسط یک کنترلر فازی تنظیم می شود به تصویر کشیده شده است.
پاسخ خروجی با تنظیم ضرایب PID به روش کلاسیک
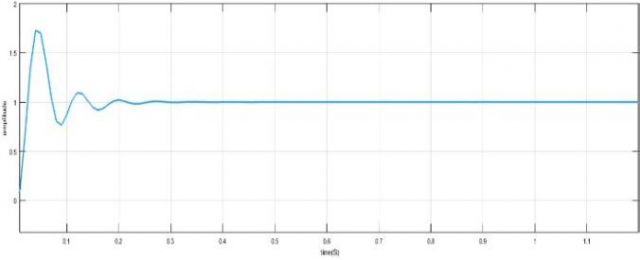
پاسخ خروجی با تنظیم ضرایب PID با استفاده از کنترلر فازی
در تصاویر بالا به وضوح توانایی کنترلر فازی برای تنظیم ضرایب PID نسبت به روش های کلاسیک پیداست. در این نوشتار به کاربرد های مختلف کنترلر فازی پرداختیم و اما در ادامه، در مطلبی دیگر تحت عنوان منطق فازی و DCS، نگاهی می اندازیم به کاربرد کنترلر های پیشرفته ای چون کنترلرهای فازی در شرکت های تولید کننده معتبر سیستم کنترل های DCS در جهان و ایران.